





现在智能车是比较火的题目,20年前我们做无人驾驶时,只有学术界关注无人车,但是现在不一样,不仅学术圈关心,产业界和政府都在关心这件事。
目前可以看到无人驾驶的系统非常多,有不同的分类方式,有些人采用的是美国SAE分级方式,也就是大家经常说的L2/L3/L4。我不是很赞同这种分类方式,很多人往往误解L2最简单,就从L2来做,这其实只是从用户的角度定义了交互方式。按照车的责任和用户责任的不同来划分,并不代表难度的高低,因为缺少了一个非常重要的因素,也就是场景。我们做定位导航会讲场景,无人车也是非常讲究场景的。
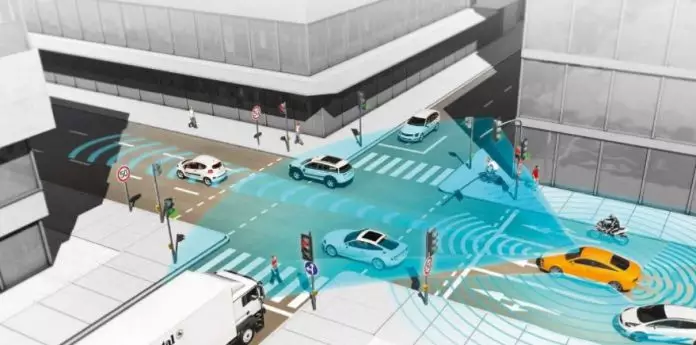
手不要碰方向盘就是L2。到了L3,眼睛不需要看路了,但需要的时候还能回来。L4级别可以去睡觉了,出了事也会提醒。这只是一个非常简单的用户角度的分类方式。现在比较多的汽车厂商都在做L2/L3方面的工作。这类场景大多数面对高速公路场景,相对来说比较简单高速公路我们知道,根本不需要关心经纬坐标,只要关心当前车道的相对位置,所以已经弱化为相对定位,这时我们对精度要求很低,现在普通的GPS已经绰绰有余,所以L2和L3驾驶对高精度定位系统要求不是很高,对环境感知的要求高一些,需要识别车道线、车辆以及可能的行人。这里已经有一些代表性的系统,因为对定位要求不高,所以商务化程度较高,成本比较低,现在已经初步实现量产。具有代表性的就是特斯拉,最激进的互联网造车企业。还有通用、奥迪A8,即便如此,由于场景非常有限,用户不一定可以意识到,所以非常容易发生交通事故。特斯拉发生各种各样的事故也是和场景相关的。如何拓展场景呢?这就需要解决定位问题,只有高精度定位才能获取更多的场景,比如城市环境对定位有非常高的要求。代表性的系统如谷歌、百度等都在做这方面的内容。头上一定要顶着激光雷达,最主要的作用就是解决定位问题。

2015年,我们做了示范应用的无人驾驶车辆,但是这辆车并没有使用GPS导航,也没有使用激光雷达导航。这辆车从2015年起给万科使用,已经3年的时间,主要是万科研发中心接待重要来宾时请来宾进行乘坐体验,委托上海交通大学开发无人驾驶车辆。我们真正解决这个应用问题,最核心的就是可以定位,需要用车路协同的方法。
这里有一个问题,智能驾驶对定位有很高的要求,但这又是一个很广的概念,不同的自动驾驶对定位的要求是不一样的。自动驾驶对定位的要求很高,要达到厘米级,人工驾驶往往米级就可以了,辅助驾驶米级也可以,协作驾驶需要达到分米级。高速公路需要分米级,纵向达到米级就可以。泊车连分米级也不够了,需要达到厘米级精度,所以不同的场景对于精度的要求也是不一样的。
最初我们往往都由GPS开始,但是直接使用GPS还是不够的,因为精度还是比较差的。我们觉得当时最辛苦,要找到制高点基站,考虑通信的覆盖,现在虚拟基站使用起来方便很多,实现起来也非常快。2013年做万科项目时,一个月要把车做起来,但一个月的时间进行车辆的开发肯定来不及,最简单的就是使用GPS,在一个月内让这辆车跑起来,所以要感谢GPS给我们提供了为万科做无人车的机会。万科工业园区里有大量的湖泊和高楼,王石的园区很多路起起伏伏,很难调教,我们最后决定用车路协同的方式解决问题。这也暴露了GPS实际应用中还是存在很多问题。为了解决这些问题,目前国外包括国内主流的方案是用感知地图的方式,也就是说不仅仅用GPS,还要用传感器提供高精度。这就要求进行环境建模,很容易拿到周围静态的地图,而不需要识别。在此基础上做目标预测,然后做规划就可以了,所以在L4中起到非常核心的作用。采用这种方案的第一个难题是做高清晰地图。高清晰地图的定义各不相同,一般可以分几个层级,第一是道路级的地图,一般来说费用很低,但对于自动驾驶来说是不够的。第二级是高精度车道地图,但是没有传感器地图,所以还需要第三层:感知地图。信息存储在地图中,几公里的路有3-4M的数据量。

这涉及到地图生成的问题,其实我们传统的方法还是可以用来做这件事,结合现在比较好的激光雷达技术,集合已有的高精度GPS定位系统。当然也有一些较小范围内可以使用的高精度IMU辅助建图,但成本还是比较高的,幸好机器人领域的SLAM技术越来越成熟,可以非常好地利用激光雷达的方法、视觉的方法、毫米波雷达的方法建立感知地图。比如上海的地铁,因为地铁在地下,不可能有任何GPS信号,所以完全没有办法用传统的方式来做。这里可以利用SLAM技术,借助2万多元的激光雷达建立起相对比较稠密的地铁内部三维地图。这种建图也进行了精度评估,初步评估下来,定位精度控制在10厘米,虽然达不到高精度,但对于无人驾驶基本够用了。有了地图之后便可以进行定位。
这里采用的方法有一个非常大的不足之处,通过低度匹配,如果环境中有许多其他运动目标,会影响到它的匹配,所以需要采用不同的技术解决这个问题。挑选非常有挑战性的场景,比如车辆非常多的场景,车辆对于地图匹配有很大的干扰。我们借助另外一个方法,定位中不仅仅靠几何定位,这也更符合人类定位的原则。往往到了一个路口要右转,怎么描述这个路口,路口有垃圾箱,倒垃圾向右转,这个是非常强的信息。所以我们引入了语意信息。实现这样的技术,也在不同的场景下进行了应用验证。地下停车场在GPS信号完全没有的情况下,都需要进行感知。我们在上海欧尚的地下车库进行过实验,里面跑一圈就可以把2.5维的数据地图做出来,通过激光雷达进行10厘米级别的高精度定位。从今年开始,我们更多地考虑不仅在地下停车场定位,从室外导航到室内导航希望是无缝衔接的,把GPS和感知地图结合在一起。到了室内环境信号不好时,无缝衔接到感知地图中,在校园里的图书馆进行了实验,定位精度非常好,但是一旦进入停车场,只能靠自身定位,在里面时完全依靠感知地图定位,精度可达10-20厘米,能够满足停车场的需求,所以即便停车场很大也没有关系,里面是全局定位,定位好后再切换到GPS定位。
类似停车场里也尝试使用非激光雷达的方案,因为激光雷达方案目前来说成本较高,成本较低的是视觉方案。传统的方法在室内停车场也存在比较大的挑战,很多光线很强,动态性会比较弱,这时我们便把一些语意信息引入进来。国内无人车领域的智能车挑战赛因为很难通过GPS鉴别,所以从2018年开始禁止大家使用GPS。我们之前一直使用地图,包括定位,高速公路一般不需要定位,但组委会要求不仅要在高速上面跑,还要在高速下面跑,如果使用惯导就非常困难了。我们采用了匹配的方式,跑30公里也不怕,因为采用的是全局定位方式,所以获得了不错的成绩。组委会觉得只设置这一个考点还是不过瘾,又出了另外一道题,制造了一个人工隧道,里面安装了铝箔材料,也许这时GPS信号还是有的,但是乱的。如果使用GPS加贯导会遇到很多问题,如果使用感知方式的话,不是太大的挑战。施加了GPS干扰,我们后来发现不用专门的车辆,转播车也可以了,在土路环境下,我们同样使用感知地图的方式解决问题,也取得了不错的效果。
最后一个应用是学校进行了无人小巴的试运营。我们在上海交通大学闵行校区和徐汇校区都进行了无人小巴的试运营。在这里我们遇到了很多问题,如果使用GPS,随着学校场景的变换,我们发现遮挡非常厉害,于是便把GPS的方法和感知定位的方法结合,建立了传感器地图。用2万多的激光雷达建立了周边道路以及闵行校区的道路,可以通过地图匹配的方式跑,再不会受到GPS干扰的影响,保障了车辆的安全。通过这样的一种感知地图匹配的方法,我们可以比较好地解决GPS定位问题,实施过程中,我们使用了相对比较高深的传感器,定位一定要使用量产化的场景,目前激光雷达的成本较高,2万多元的成本虽然看起来很便宜,但是对于汽车来说还是很高的,所以未来基于毫米波雷达的方式是非常有前景的方向。因为毫米波的成本非常低,一辆车只要100美金,对于恶劣天气下的效果很好。另外,探索如何将更多语意信息引入定位中,提高定位过程中的稳定性也是比较有前景的方式。




上海北斗导航创新研究院
SHANGHAI BEIDOU RESEARCH INSTITUTE
