






城市环境中的测试路线

数据收集路线概览:由Google Earth获取的3D城市景观
《具有挑战性的城区低成本导航体系结构检测与弹性多径预测》一文给出了具有挑战性的城区低成本导航体系结构检测与弹性多径预测的方法。该方法的创新性贡献如下:首先,基于平台的速度和SQM(信号质量监测)统计变化率,生成能够自动调整大小的滑动窗口,用于SQM样本的多径检测。基于现实世界的数据集分析,设计了单尾显著性检验,并生成了临界值查询表。滑动窗口尺寸的可调节性,将在深层城市峡谷运动场景中识别多径污染信号的概率提升了15%;其次,为了扩展GNSS信号强度图的可用性,开发了用于预测地图空间模式的随机森林机器学习模型。该模型采用真实世界的GNSS信号强度图进行训练,该图覆盖蒙特利尔市中心五平方公里的区域,3D城市模型、街道类型和交通密度数据被用作其特征,能达到83%的地图预测精度;第三,开发了结合SQM多径检测和GNSS信号强度图辅助多径预测的Unscented卡尔曼滤波器(UKF)随机模型调整架构。该架构旨在解决每种方法的局限性,并允许连续多路径监控,增加多传感器数据融合UKF的弹性。
这个方法在几个案例中使用低成本硬件进行测试:松散耦合和紧密耦合的IMU / GNSS集成和多GNSS智能手机定位。与SQM多径检测和GNSS信号强度图独立应用时相比,该方法提高了15%的定位精度。预计这项工作的结果将有助于未来改进GNSS在具有挑战性城市地区多传感器平台的集成工作。
《物联网相关应用和用于陆地车辆的无系留定位及导航解决方案》一文中提出了物联网相关应用和陆地车辆的无系留定位及导航解决方案。由于信号阻塞和衰减,频繁的周跳和卫星几何形状差,GNSS解决方案的准确性会降低。这种情况在诸如市中心的核心区域、隧道和有盖停车场等恶劣环境中普遍存在。PPI开发了一种新的惯性导航技术Un-tethered Fusion+来解决这个问题。Fusion+是一个独立的系统,能够处理原始IMU测量数据,并将其以松散耦合(LC)的方式与GNSS的位置和速度集成,而无需车辆所需的额外传感器,如速度或电子罗盘。虽然Fusion +的开发是为了选择性地接受和使用GNSS以外的多个更新源,但并不是必需的。本文严格依据IMU读数和GNSS呈现Fusion +的结果,展示了Fusion +在长时间GNSS信号中断时仍可以实现的精准性。
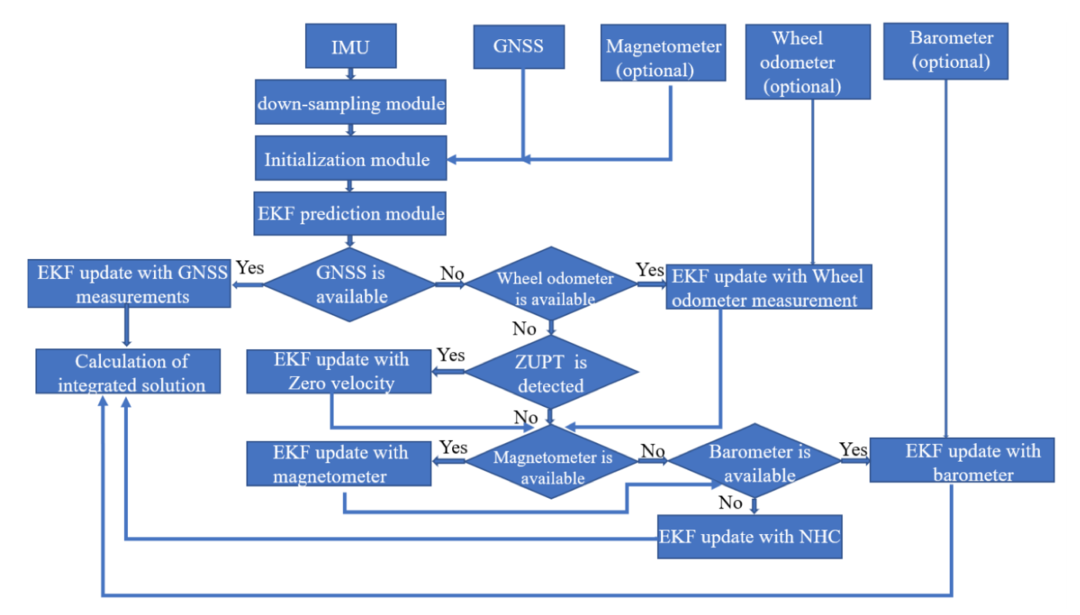
PPI公司Profound UDR惯导解决方案流程图
Fusion +的优势在于,利用低精度惯性技术的同时,在具有挑战性的GNSS环境中提供可靠的定位解决方案。它无需更新其它GNSS等外部传感器或系统即可获得卓越的性能。使用低成本惯性传感器和消费级GNSS接收器,同时提供高定位精度,而不依赖于来自车辆的电信号,为Fusion +成为物联网应用(如资产跟踪和汽车导航)的关键参与者打开了大门。
1. Ivan Smolyakov, Mohammad Rezaee and Richard B. Langley, Department of Geodesy and Geomatics Engineering, University of New Brunswick, Canada. Resilient Multipath Prediction and Detection Architecture for Low-cost Navigation in Challenging Urban Areas. ION GNSS+ 2019.
2. Yashar Balazadegan Sarvrood, Mostafa Sakr, Ahmed Wahdan, Walid Abdelfatah and Naser El-Sheimy, Profound Positioning Inc., Canada. Un-Tethered Positioning and Navigation Solution for IoT Applications and Land Vehicles. ION GNSS+ 2019.




上海北斗导航创新研究院
SHANGHAI BEIDOU RESEARCH INSTITUTE
