【重磅】网易携手上海北斗导航创新研究院、上海交大, 世界顶级AR学术会议ISMAR 2019联合发布面向AR的视觉/惯性数据集
来源:
|
作者:北研院
|
发布时间 :2019-10-24
|
936 次浏览:
|
分享到:
由IEEE支持举办的“2019国际混合与增强现实研讨会”(ISMAR 2019)近期在北京召开。ISMAR 被评为 AR 领域的顶级学术会议。这也是此项国际学术会议自1988年创办20多年以来首次在中国举办。来自学术界和工业界最新展示的一系列 AR 研究和应用,显现出这项技术改变移动智能世界的潜力。
在本次会议中,网易AR团队联袂上海交通大学、上海北斗导航创新研究院、浙江大学共同发表的学术论文:Cheng Wang, Yu Zhao, Jiabin Guo, Ling Pei, Yue Wang, Haiwei Liu. NEAR: The NetEase AR Oriented Visual Inertial Dataset.并发布面向AR的视觉/惯性全球开源数据集:NEAR。这是全球首个公开论文发表并且开源发布的,面向AR的Vision/Inerial(VI)数据集。数据集的制作在上海北斗导航创新研究院智能无人系统试验场完成,试验场搭建了居家标准测试环境,并提供了亚毫米级/百赫兹输出的标定真值、校准参数。通过5种不同的智能手机及视觉传感器采集了包括了110个序列,49个场景的数据,完整数据集可通过上海北斗导航创新研究院提供的数据平台公开获取:
https://github.com/EZXR-Research/NEAR-VI-Dataset。
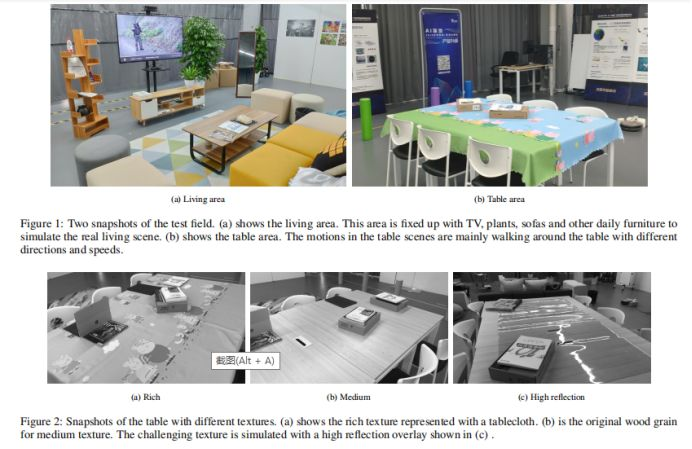
图1
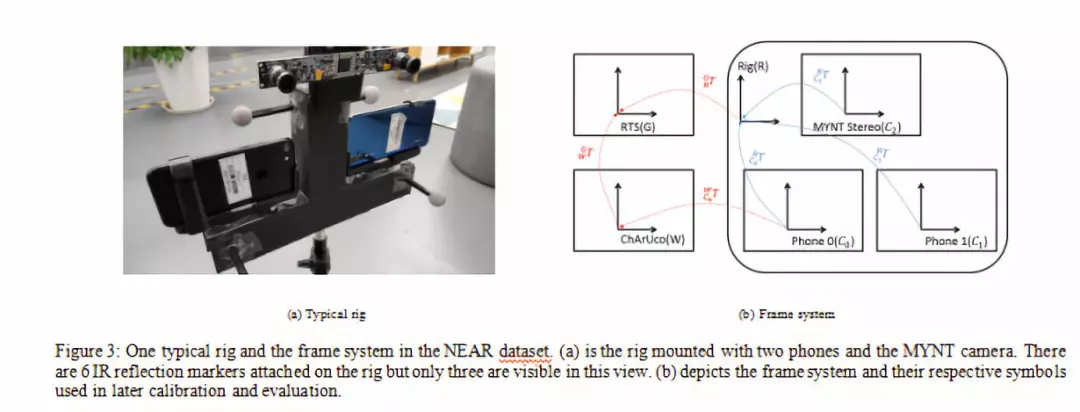
图2
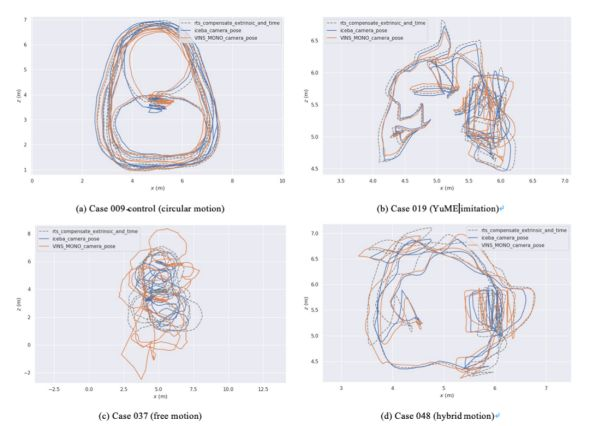
图3
视觉惯性测量或即时定位与地图构建(SLAM)是移动设备上所AR应用程序的核心。然而,大多数AR应用程序状态估计所应用的视觉惯性里程计,其设计初衷都是服务于机器人等的研发,直接将这些方法应用于AR领域或许会存在一些问题。首先,视觉惯性里程计往往需要对布局或范围进行调整以适应AR场景。据目前所知,现在尚未有针对AR场景公开而全面的视觉惯性里程计评估。其次,过往的地面实况数据集通常是由一些特殊设计的设备搜集的,例如视觉惯性传感器。AR的主要应用领域是消费电子产品,如手机这类最为广泛使用的AR平台。此外,大多数现存数据集是利用轮式机器人或微型飞行器作为载体搜集的,它们的运动模式与AR的运动模式迥然不同,后者常常是不可预测且无法掌控的。NEAR视觉/惯性数据集很好地弥补的这一领域的数据缺失。
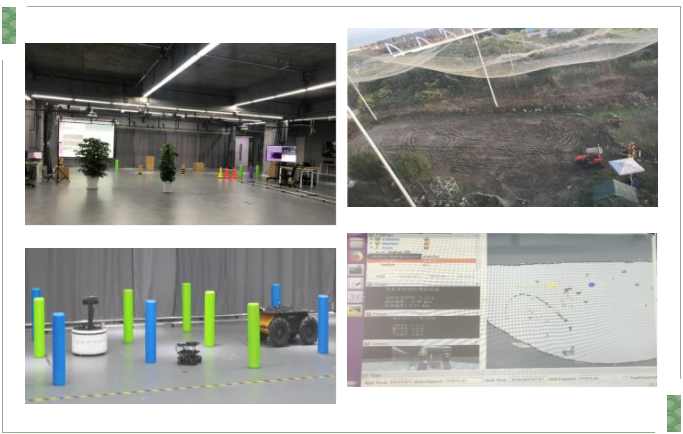
图4
上海北斗导航创新研究院智能无人系统试验场,位于上海市青浦区高光路北斗产业园区的1号楼,测试场分为室内测试场和室外测试场两部分。主要面向传感器和智能无人系统,提供标准测试、非标准测试、定制化测试、测试数据集的完整体系测试服务。同时针对典型场景下导航定位、环境感知、规划控制性能等提供精确测量和性能评估,形成相关的测试标准与测试服务能力。通过标定精度与维度、覆盖的场景类型与规模、数据集完备性、智能评测四个方面打造国际一流的、标杆性的智能无人系统高精度导航定位综合试验场,引领智能无人系统高精度环境感知、定位导航技术的集群创新和产业集聚发展。










